Industrieroboter sind ein zentraler Bestandteil automatisierter Fertigung, jedoch durch ihre begrenzte Posegenauigkeit eingeschränkt. Das Projekt KamInGFK untersucht Trackingkameras zur direkten Regelung der Pose, um Genauigkeit und Produktivität kosteneffizient zu steigern.
Juni 2026 – Industrieroboter sind ein zentraler Bestandteil moderner Produktionssysteme und ermöglichen hoch automatisierte und flexible Fertigungsprozesse, insbesondere in Handhabungs-, Schweiß- und Montageprozessen. Die absolute Posegenauigkeit T von Industrierobotern schränkt ihren Einsatz in Fertigungsprozessen mit hohen Genauigkeitsanforderungen wie dem Fräsen jedoch ein. Bisher werden modellbasierte oder auch datengetriebene Verfahren genutzt, um die Genauigkeit zu steigern. Die allerdings sind durch notwendigerweise vereinfachende Annahmen, Echtzeitanforderungen sowie Messrauschen limitiert. Hinzu kommt, dass umfangreiche Messdaten zur Modellbildung und Änderungen der Betriebsbedingungen eine regelmäßige Neukalibrierung erfordern.
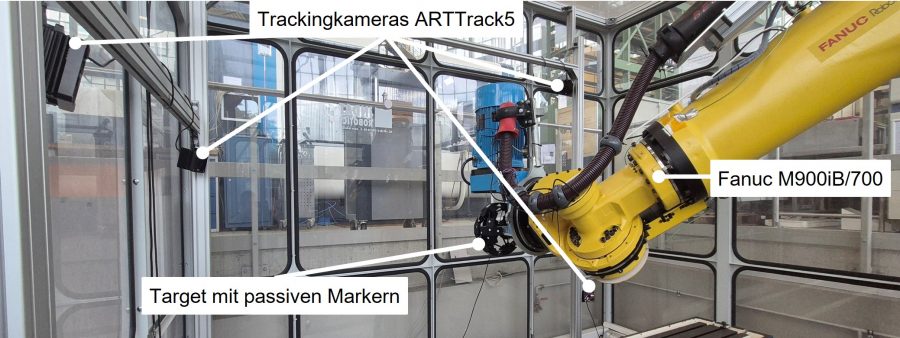
Alternativ kann die Pose P direkt mittels externer Sensorik geregelt werden. Lasertracking-Systeme eignen sich hierfür gut, sind jedoch teuer. Im Projekt KamInGFK erproben daher WGP-Forschende am Institut für Werkzeugmaschinen und Fabrikbetrieb (IWF) der TU Berlin den Einsatz von Trackingkameras, um die Pose P in der roboterbasierten Zerspanung von glasfaserverstärkten Kunststoffen (GFK) zu regeln. Denn Kameras sind günstiger und können darüber hinaus große Arbeitsbereiche ohne Verdeckung des Targets überwachen.
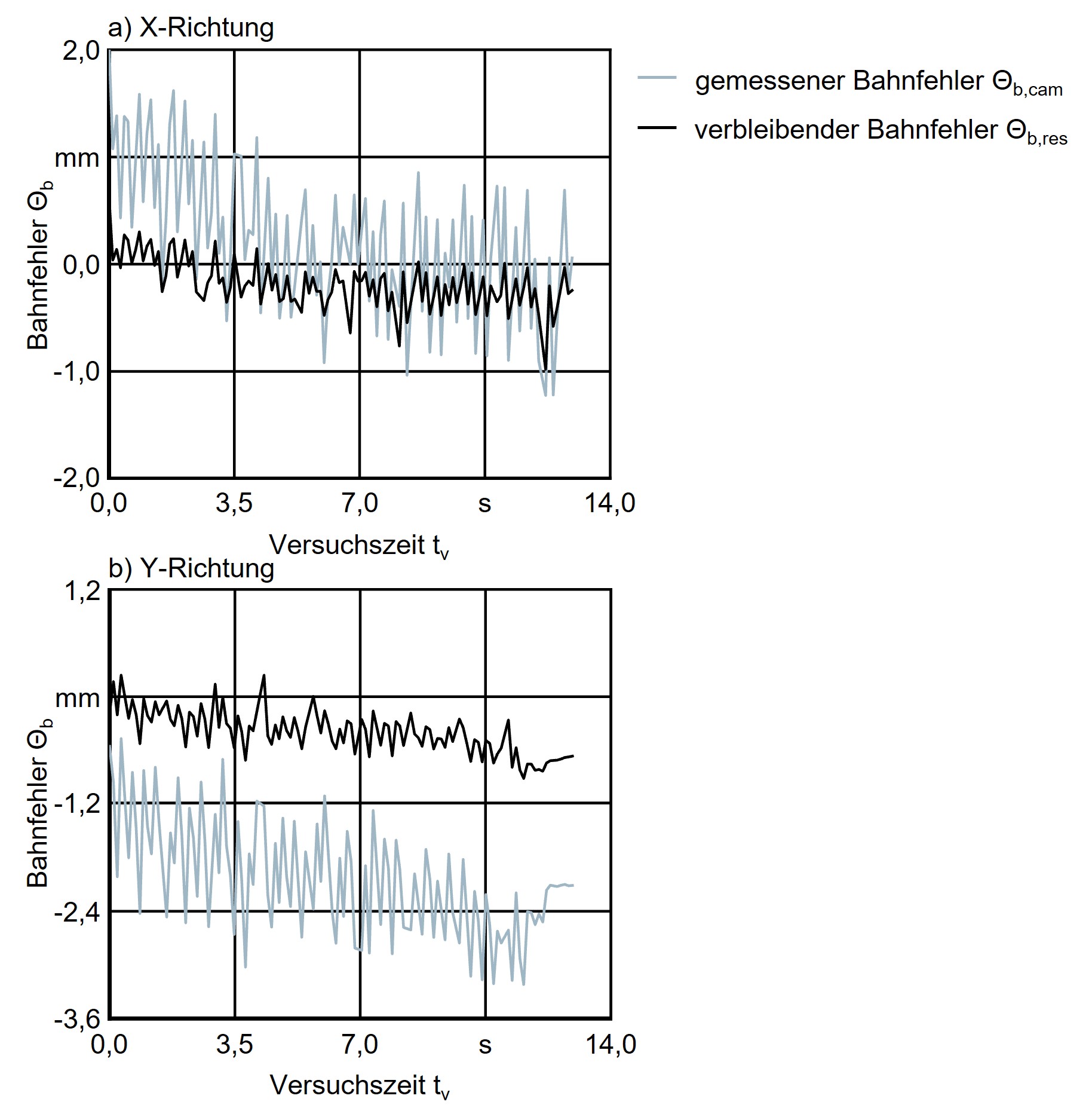
Bild 1: Mittels der Trackingkameras gemessener sowie verbleibender Bahnfehler θb,cam bzw. θb,res; a) X Richtung; b) Y Richtung | Quelle: IWF – TU Berlin
Tracking per Kamera ist klar überlegen
Das Team am IWF Berlin stattete eine Roboterzelle mit vier Trackingkameras der Firma Advanced Realtime Tracking GmbH & Co. KG aus (vgl. Beitragsbild). Am Fanuc-Industrieroboter ist zusätzlich ein neu entwickeltes Target mit passiven Markern installiert. Letztere besitzen Punkte, die das Infrarotblitzlicht der Kamera reflektieren, wodurch die Targets genau lokalisiert werden können. Um die berechnete Pose P in Echtzeit an die Robotersteuerung zu übermitteln, entwickelten die Forschenden eine neuartige Datenschnittstelle. Abweichungen von der geplanten Bahn werden über einen Regelkreis im Gesamtsystem kompensiert.
Das Team konnte zeigen, dass durch ihre neue Methode Bahnfehler in X-Richtung um 57 Prozent und in Y-Richtung um 80 Prozent reduziert werden können, siehe Bild 1.
Wenn das Zielobjekt eingeschränkt sichtbar ist
In rauen Industriebedingungen, insbesondere bei der Zerspanung von GFK, können Stäube die Sichtbarkeit des Targets einschränken. Zudem können Restriktionen hinsichtlich der Pose P dazu führen, dass das Target zeitweise nicht erfasst wird. In solchen Fällen ist eine Kompensation von abweichenden Trajektorien im Fertigungsprozess über die Trackingkameras nicht direkt möglich. Für dieses Szenario wurde die Kompensationsstrategie um einen Extended Kalman-Filter (EKF) erweitert, wobei die aktuelle Pose P des Industrieroboters geschätzt wird. Während der Phasen eingeschränkter oder fehlender Sichtbarkeit wird die vom EKF geschätzte Pose P für die Bahnkompensation verwendet, siehe Bild 2.
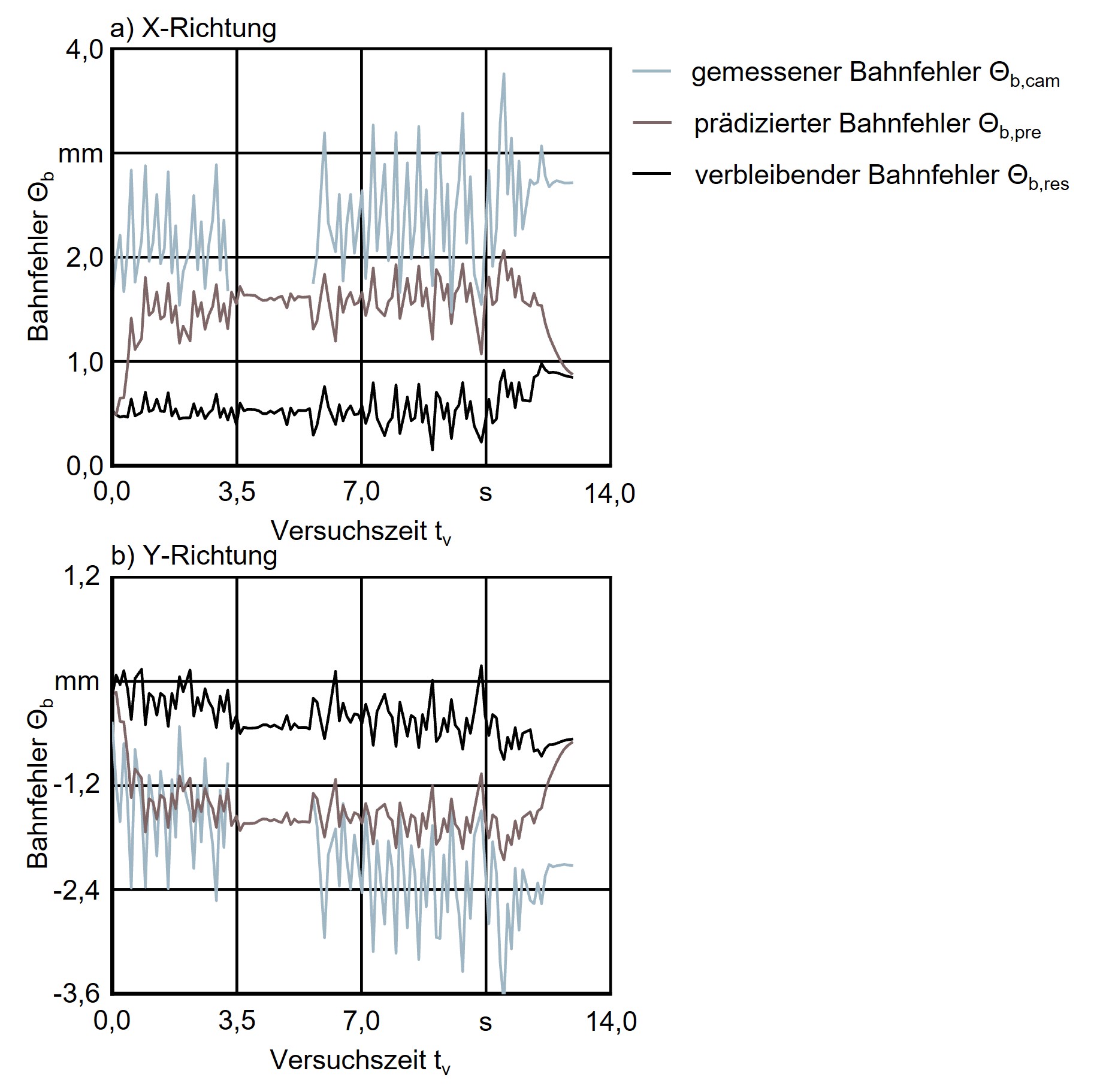
Bild 2: Kompensation des Bahnfehlers θb in einem Szenario mit Ausfall der Trackingkameras; a) X Richtung; b) Y Richtung | Quelle: IWF – TU Berlin
Die gezeigten Ergebnisse stellen wichtige Schritte zur Regelung der Pose P dar und tragen somit zur kostengünstigen Ertüchtigung von Industrierobotern für Fräsbearbeitungen bei. Durch die adaptive Filterung erlangt die roboterbasierte Fertigung die notwendige Resilienz gegenüber einer Vielzahl von Unwägbarkeiten im Produktionsprozess, um selbst bei komplexeren Trajektorien eine Verminderung von Ausschuss und somit eine Produktivitätssteigerung zu gewährleisten.
Hohe Genauigkeit und niedrige Kosten
Mit KamInGFK konnte das Forscherteam also nachweisen, dass Bahnabweichungen von mit Kameras überwachten Fanuc-Industrieroboter kompensiert werden können und sich dadurch die Posegenauigkeit erheblich steigern lässt. In der roboterbasierten Fertigung wurde durch das Projekt das Potenzial aufgezeigt, dass selbst bei komplexeren Bahnen der Ausschuss reduziert und damit die Produktivität erhöht werden kann.
Ein weiterer nicht unwesentlicher Vorteil der neuen Methode ist wohl auch der Preis: Die Kameratechnik ist mit rund 30.000 bis 35.000 Euro deutlich günstiger als die Lasertracker. Die Kosten hierfür belaufen sich auf über 100.000 bis 150.000 Euro.
Förderer:
Dieses Projekt wird vom Bundesministerium für Wirtschaft und Energie (BMWE) aufgrund eines Beschlusses des Deutschen Bundestages gefördert.
Ansprechpartner:
Institut für Werkzeugmaschinen und Fabrikbetrieb
Technische Universität Berlin
Prof. Eckart Uhlmann
Fachgebietsleiter
Fachgebiet Werkzeugmaschinen und Fertigungstechnik
Tel.: +49 30 31479604
E-Mail: uhlmann@iwf.tu-berlin.de
Oliver Sobiak
Wissenschaftlicher Mitarbeiter
Tel.: +49 30 31477799
E-Mail: sobiak@iwf.tu-berlin.de
Downloads:
Demonstrator einer kameraüberwachten Roboterzelle | Quelle: IWF – TU Berlin
Mittels der Trackingkameras gemessener sowie verbleibender Bahnfehler θb,cam bzw. θb,res; a) X Richtung; b) Y Richtung | Quelle: IWF – TU Berlin
Kompensation des Bahnfehlers θb in einem Szenario mit Ausfall der Trackingkameras; a) X Richtung; b) Y Richtung | Quelle: IWF – TU Berlin