
Brückenkrane können in der Intralogistik künftig intuitiv gesteuert werden. Im Forschungsprojekt KraNavi der WGP wird hierfür ein Robot-Operating-System (ROS) implementiert, das die Kommunikation zwischen Mensch-Maschine-Schnittstelle, Aktorik und Sensorik ermöglicht. Das reduziert Fehler, optimiert Verfahrwege und beschleunigt den Transport.
Juni 2026 – Brückenkrane werden im produktionstechnischen Kontext für den Transport von schweren oder sperrigen Lasten verwendet. Die Lastenarten reichen von Einzelteilen für die Montage bis hin zu zusammenhängenden gefertigten Anlagen. Statisch betrachtet besitzt der Kran drei Freiheitsgrade, die mit drei Antrieben gesteuert werden können. Das ermöglicht die Positionierung des Tragmittels und der angeschlagenen Lasten im gesamten Arbeitsraum. Dynamisch betrachtet, treten durch Pendelbewegungen und Rotation der Last weitere Freiheitsgrade auf. Der Brückenkran kann daher als unteraktuiertes robotisches System verstanden werden. Um die Lasten präzise auszurichten, bedarf es daher Erfahrungswerte und Routine, die insbesondere in Zeiten des Fachkräftemangels abnehmen.
Die konventionelle Bedienung von Brückenkranen erfolgt primär über flurbediente Fernsteuerungen. Die Belegung der Taster ist hersteller- und anlagenspezifisch. Insbesondere bei unregelmäßiger Nutzung durch die Mitarbeitenden geht das mit einem hohen Potenzial zur Fehlbedienung einher. Durch die Trägheit des Gesamtsystems sind schnelle Korrekturen von ungewollten Steuerbefehlen nur schwer möglich, wodurch die Bedienfehler mit potenziellen Material- oder Personalschäden einhergehen.
Neuartiges cyber-physisches System
Die Wissenschaftlerinnen und Wissenschaftler des WGP-Instituts für Transport- und Automatisierungstechnik (ITA) an der Leibniz Universität Hannover forschen zusammen mit dem Institut für Integrierte Produktion Hannover (IPH) an einem cyber-physischen System (CPS), das mit Hilfe einer Augmented-Reality-(AR)-Brille eine intuitive Steuerung des Brückenkrans ermöglicht. Neben der gestenbasierten Interaktion bietet AR die Möglichkeit, den Nutzenden virtuell Informationen in ihr natürliches Blickfeld einzublenden, um das Handling des robotischen Systems zu verbessern.
Die Anforderungen an die CPS-Architektur (Bild 1) sind insbesondere im Hinblick auf die Echtzeitfähigkeit hoch. Neben der latenzarmen Kommunikation zur Ausführung der Steuerbefehle wird eine sensorbasierte Erfassung des gesamten Arbeitsbereichs angestrebt.
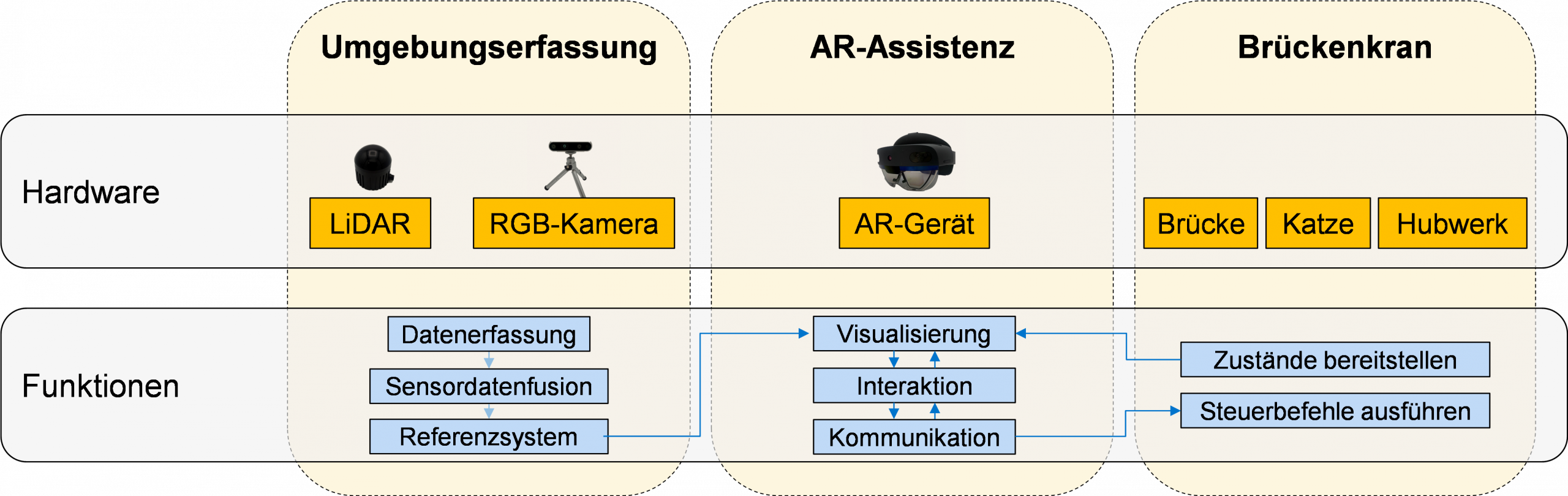
Bild 1: Cyber-physisches System für AR als Mensch-Maschine-Schnittstelle | Quelle: ITA Hannover
Für die Umgebungserfassung werden verschiedene LiDAR- und Kamerasensoren in der Werkshalle installiert und die Daten fusioniert. Als Middleware ist ROS 2 implementiert. Die Datenverarbeitung erfolgt dann über eine zentrale Rechnereinheit. Die erfassten dynamischen und statischen Hindernisse werden zur Minimierung der Rechenzeiten vereinfacht und positionsgetreu in ein virtuelles Abbild übertragen. Innerhalb des digitalen Systems ist die AR-Schnittstelle implementiert. Aufgrund eines gemeinsamen Referenzsystems lassen sich virtuelle und reale Umgebung überlagern und Zielorte im Arbeitsraum markieren. Durch eine Trajektorienregelung und die entsprechende Schnittstelle zur Steuerung des Krans wird der freie Lasthaken automatisiert an die ausgewählten Orte positioniert. Auf Basis der Umgebungsinformationen können potentielle Kollisionen detektiert, Routen- sowie Steuerbefehle berechnet und über die AR-Schnittstelle visualisiert werden.
Höhere Arbeitssicherheit und niedrigere Durchlaufzeiten
Die angestrebte Mensch-Maschine-Interaktion erhöht die Effizienz in produktionstechnischen Umgebungen. Die implementierten Assistenzsysteme steigern die Arbeitssicherheit, indem Kollisionen durch aktive Warnsysteme und intuitive Bedienung verhindert werden. Zusätzlich können die Durchlaufzeiten der Transportprozesse minimiert werden, indem der Bediener bei der Steuerung des unteraktuierten Systems unterstützt wird. In einer virtuellen Nutzerstudie (vgl. Bild 2) wurde ein erstes Konzept der AR-Steuerung mit einer konventionellen Fernsteuerung verglichen. Im direkten Vergleich ist auf Basis verschiedener Testszenarien validiert worden, dass die neue KraNavi-Interaktion ab der ersten Bedienung deutlich intuitiver ist. Die Aufgaben konnten schneller und mit weniger Fehlbedienungen gelöst werden. Durch die Reduktion der erforderlichen Steuerbefehle und die Optimierung der Verfahrwege wird ein schnellerer Lastentransport erzielt.
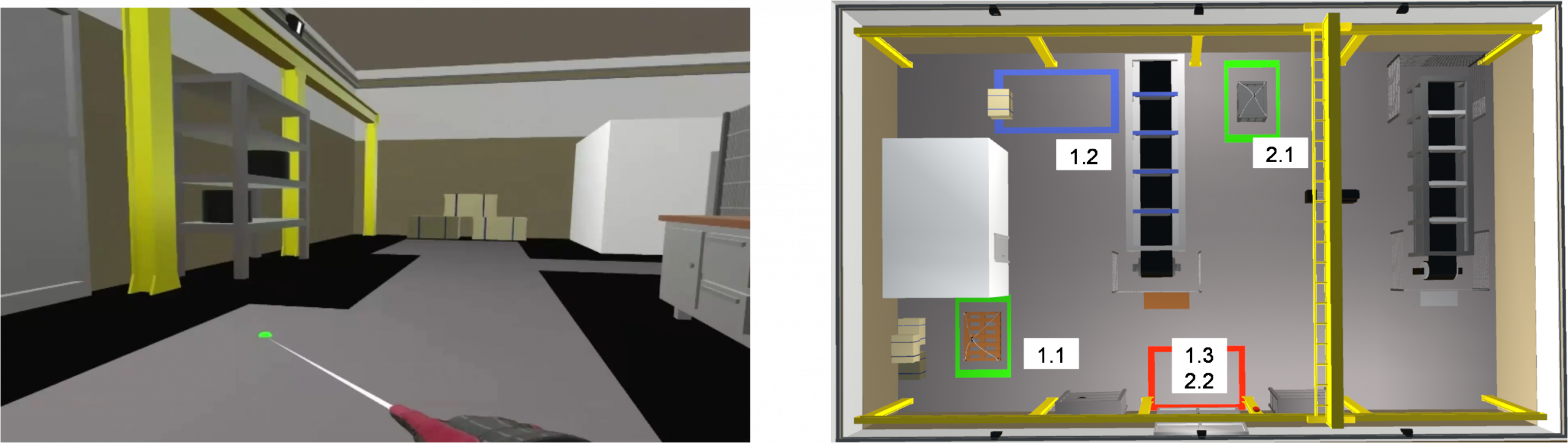
Bild2: Ausschnitt aus dem VR-Testszenario (links: gestenbasierte Auswahl eines Zielortes, rechts: Vogelperspektive auf die virtuelle Halle mit Zielorten der Nutzerstudie) | Quelle: ITA Hannover
Förderer:
Forschungsgemeinschaft IFL: https://www.ifl-forschung.de/
Ansprechpartner:
Institut für Transport- und Automatisierungstechnik (ITA)
Leibniz Universität Hannover
Prof. Ludger Overmeyer
Institutsleitung
Tel.: +49 511 7622503
E-Mail: ludger.overmeyer@ita.uni-hannover.de
Anna-Lena Fritze
Wissenschaftliche Mitarbeiterin
Tel.: +49 1523 7620533
E-Mail: annalena.fritze@ita.uni-hannover.de
Downloads:
Intuitive Steuerung | Quelle: ITA Hannover
Cyber-physisches System für AR als Mensch-Maschine-Schnittstelle | Quelle: ITA Hannover
Ausschnitt aus dem VR-Testszenario (links: gestenbasierte Auswahl eines Zielortes, rechts: Vogelperspektive auf die virtuelle Halle mit Zielorten der Nutzerstudie) | Quelle: ITA Hannover