Hochdynamische Märkte verlangen modulare und skalierbare Intralogistik. Das Projekt DiMoLo zeigt, wie mobile Manipulatoren und ein digitaler Ressourcenzwilling reale Betriebsdaten nutzbar machen und so einen wesentlichen Schritt hin zur Gestaltung zukünftiger Intralogistiksysteme leisten kann.
Juni 2026 – Hochdynamische Märkte, steigende Variantenvielfalt und Fachkräftemangel erhöhen den Druck auf Unternehmen, ihre Produktions- und Logistiksysteme flexibel und skalierbar auszulegen. Mobile Manipulatoren (MM), also mit einer selbstfahrenden Basis ausgestatteter Roboterarm, bieten hierfür einen vielversprechenden Ansatz, da sie autonomen Transport mit flexibler Handhabung kombinieren und so ein wandlungsfähiges Materialhandling ermöglichen.
In der Praxis fehlt jedoch die notwendige digitale Transparenz: Planung und Auslegung intralogistischer Systeme basieren heute überwiegend auf Herstellerangaben und vereinfachten Annahmen. Reale Betriebsdaten – etwa zu Geschwindigkeit, Energieverbrauch oder Störungen – werden kaum berücksichtigt. Die Folge sind Unsicherheiten in der Dimensionierung, ineffiziente Ressourcennutzung und eingeschränkte Planungsqualität.
Das Projekt DiMoLo adressiert diese Lücke mit der Entwicklung eines Digitalen Ressourcenzwillings (DRZ). Ziel ist es, eine durchgängige Datenbasis zwischen Shopfloor und Planung zu schaffen und reale Betriebsdaten systematisch für die Auslegung und Optimierung zukünftiger Logistiksysteme nutzbar zu machen.
Technologischer Ansatz
Kern des Ansatzes ist die digitale Abbildung von MM als Datenquelle für die Planung von intralogistischen Materialflusssystemen. Relevante Betriebs- und Zustandsdaten – darunter Position, Geschwindigkeit, Energieverbrauch und Störungen – werden über standardisierte Schnittstellen (OPC UA) erfasst, harmonisiert und in einer Verwaltungsschale (engl. Asset Administration Shell, AAS) strukturiert abgelegt.
Diese Daten stehen Planungs- und Simulationsmodellen automatisiert zur Verfügung. Materialflusssimulationen greifen damit nicht mehr auf statische Annahmen zurück, sondern auf reale, systemindividuelle Parameter. Dadurch entstehen valide, belastbare Entscheidungsgrundlagen für die Auslegung und Weiterentwicklung intralogistischer Systeme.
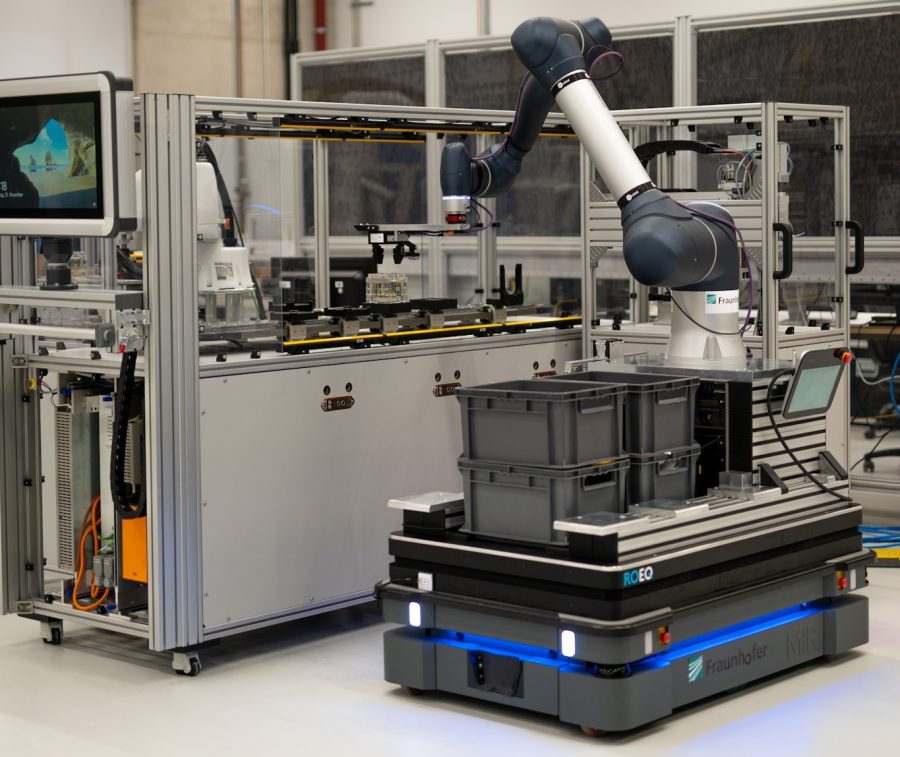
Zur Validierung wurde ein am Fraunhofer IGCV entwickelter MM (siehe Bild 2) integriert. Das System kombiniert eine mobile Plattform, einen Manipulator sowie ein Liftsystem und verfügt über zehn Freiheitsgrade. Die modulare Architektur ermöglicht eine flexible Anpassung an unterschiedliche Einsatzszenarien und wird vollständig digital im DRZ abgebildet.
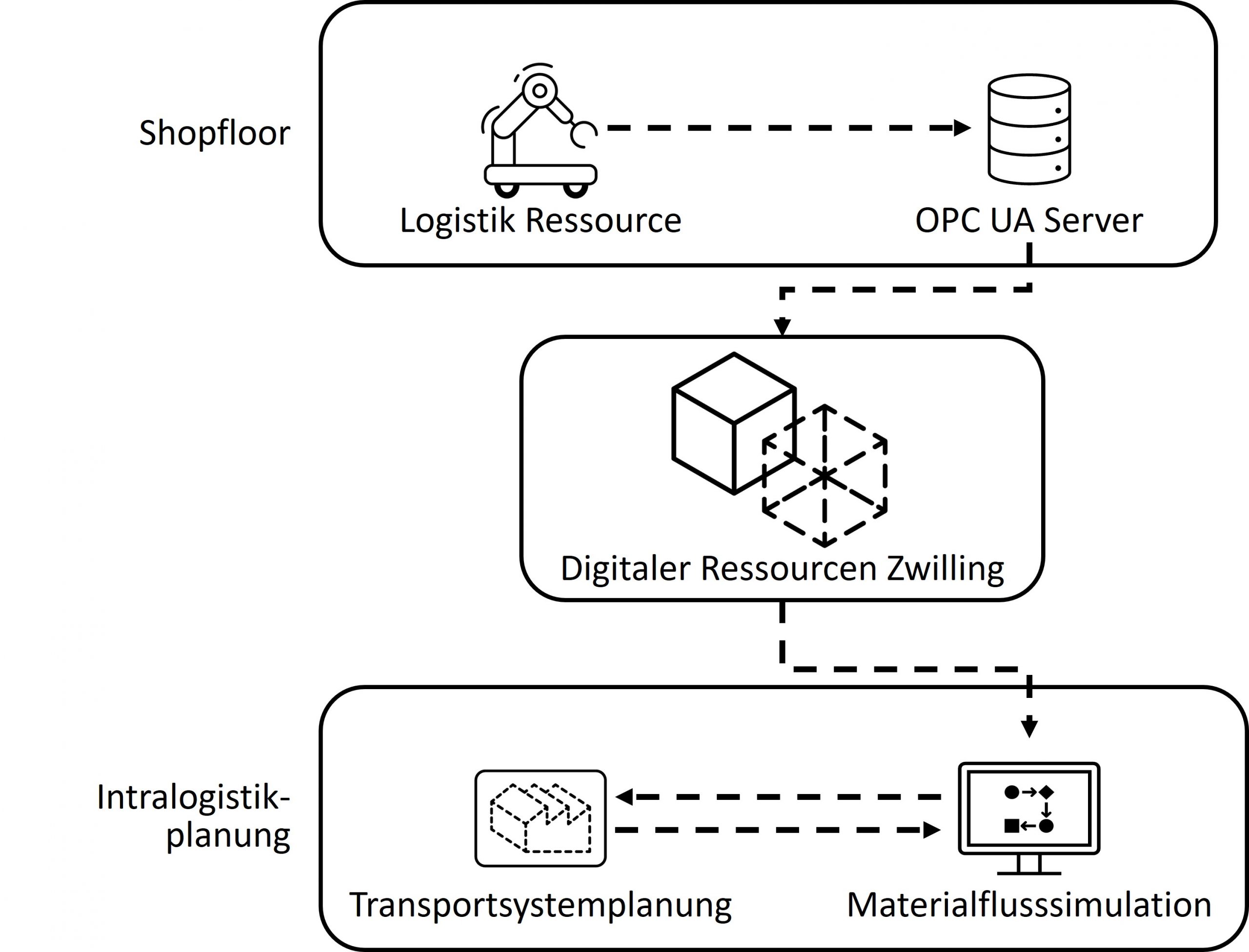
Bild 1: Konzept zur Schaffung digitaler Transparenz zwischen Shopfloor und Intralogistikplanung | Quelle: Fraunhofer IGCV
Validierung und Ergebnisse
Die Wirksamkeit des Ansatzes wurde in drei zentralen Anwendungsfällen untersucht, bei denen Kleinladungsträger mit dem MM zwischen Lager und mehreren Stationen transportiert und abgegeben wurden:
- Energieoptimierung: Die Analyse zeigt signifikante Abweichungen zwischen Energieverbrauchsdaten des Herstellers und dem tatsächlichen Energieverbrauch (Abweichung bis zu 25 %). Die Nutzung realer Betriebsdaten ermöglicht eine deutlich präzisere Auslegung von Energie- und Infrastrukturkapazitäten.
- Flottendimensionierung: Reale Geschwindigkeitsprofile führen zu einem höheren Fahrzeugbedarf als idealisierte Annahmen. Dadurch wird deutlich, dass klassische Planungsansätze den tatsächlichen Systembedarf systematisch unterschätzen.
- Prozessoptimierung und Störungsmanagement: Durch die Auswertung realer Störungsdaten können Ausfälle erstmals systematisch modelliert werden. Dies erlaubt eine gezielte Anpassung von Flottengrößen, Aufgabenverteilung und Puffern zur Erhöhung der Prozessstabilität.
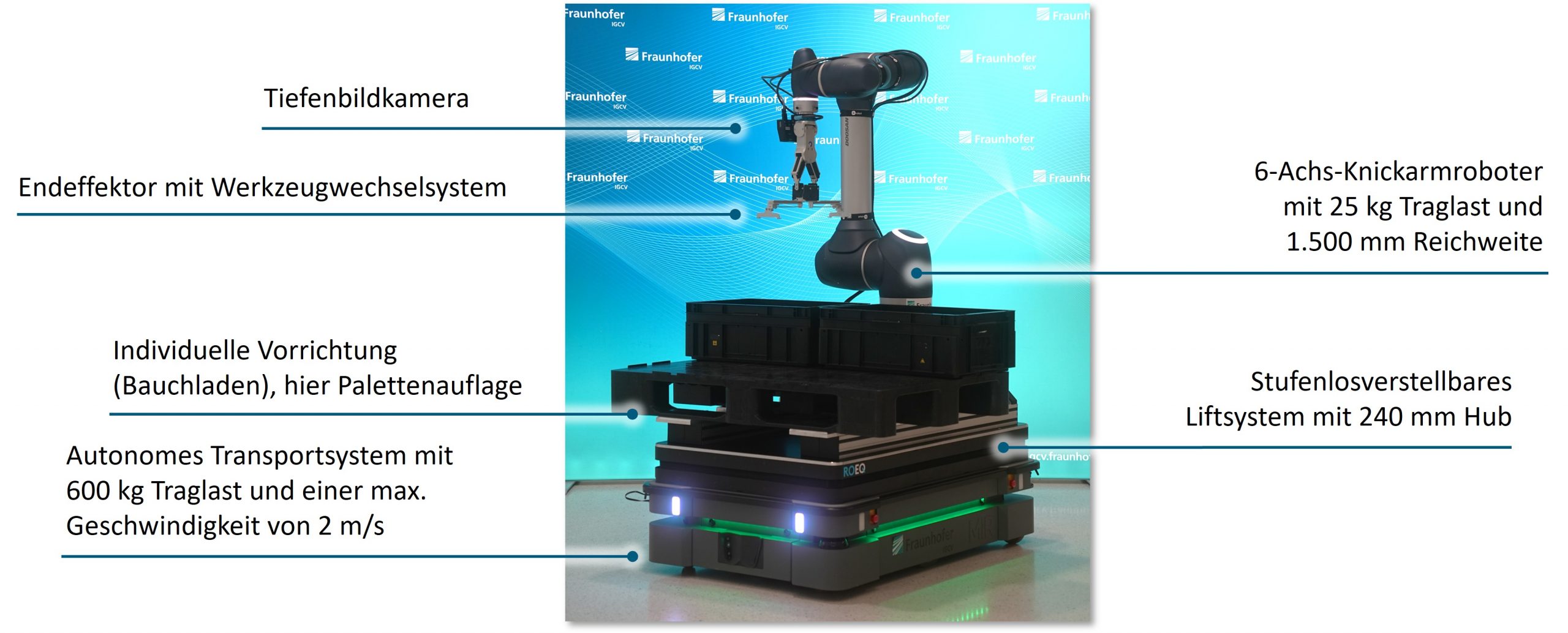
Bild 2: Mobiler Manipulator des Fraunhofer IGCV, Aufbau | Quelle: Fraunhofer IGCV
Ausblick
Mit dem DRZ wird die Lücke zwischen realem Betrieb und Planung geschlossen. Die datengestützte Auslegung ermöglicht robustere, effizientere und nachhaltigere Intralogistiksysteme mit MM. Langfristig will das Team diesen Ansatz für adaptive, selbstoptimierende Produktions- und Logistiksysteme nutzen, die sich dynamisch an veränderte Rahmenbedingungen anpassen.
Weiterführende Informationen:
Förderer:
Bundesministerium für Wirtschaft und Energie (BMWE)
Ansprechpartner:
Institut für Werkzeugmaschinen und Betriebswissenschaften (iwb)
Technische Universität München
Prof. Rüdiger Daub
Lehrstuhlinhaber Produktionstechnik und Energiespeichersysteme
Leiter Fraunhofer IGCV
Tel.: +49 821 90678121
E-Mail: ruediger.daub@igcv.fraunhofer.de
Florian Karg
Wissenschaftlicher Mitarbeiter am Fraunhofer IGCV (Intelligente Prozessführung und Robotik)
Tel.: +49 821 90678166
E-Mail: florian.karg@igcv.fraunhofer.de
Downloads:
Mobiler Manipulator des Fraunhofer IGCV | Quelle: Fraunhofer IGCV
Konzept zur Schaffung digitaler Transparenz zwischen Shopfloor und Intralogistikplanung | Quelle: Fraunhofer IGCV
Mobiler Manipulator des Fraunhofer IGCV, Aufbau | Quelle: Fraunhofer IGCV