Im internationalen Forschungsprojekt GRIP, das von dem WGP-Institut IWP in Chemnitz koordiniert wird, entsteht ein innovatives, modulares Greif- und Überwachungssystem. Da Handhabung und Prozessanalyse gleichzeitig passieren, werden Prozesse und Produkte resilienter und nachhaltiger.
Juni 2026 – Am Institut für Werkzeugmaschinen und Produktionsprozesse (IWP) der Technischen Universität Chemnitz entwickeln Forschende der WGP gemeinsam mit polnischen Partnern im Projekt GRIP ein modulares Greifersystem, das Handlings- und Messaufgaben parallel durchführt. Dadurch können bestehende Prozessketten verkürzt werden. Ziel ist es, mit der Entwicklung eines solchen Messgreifers die ungenutzten Potentiale hinsichtlich Effizienz, Flexibilität und Präzision umzusetzen, insbesondere vor dem Hintergrund einer stetig zunehmenden Produktvielfalt bei gleichzeitig verkürzter Produktlebensdauer.
Durch die Integration von Multisensorik in einen Greifer sollen Fertigungsabweichungen direkt im Prozessschritt detektiert werden. Damit eröffnen sich neue Möglichkeiten zur automatisierten Optimierung und Fehlerkompensation. In dem internationalen Projekt GRIP arbeiten in Deutschland und in Polen jeweils zwei Unternehmen und eine Forschungseinrichtung an unterschiedlichen Anwendungsfällen.
Prozessmonitoring mittels aktiven Rotierens
Der erste Anwendungsfall beinhaltet das Prozessmonitoring. Er befasst sich mit der Analyse von wärmebehandelten Bauteilen vor und nach dem Bearbeitungsprozess. Messgrößen wie der Rundlauf, die Oberflächentemperatur und auch die optische Inspektion der Bauteile sollen zur Prozessüberwachung und -optimierung beitragen. Dazu wurde einerseits ein Greifmodul entwickelt, das ein aktives Rotieren der Wellenbauteile im gegriffenen Zustand ermöglicht. Simultan zur Rotation können über einen Lasersensor geometrische Kenngrößen aufgezeichnet werden. Ein in den Greiffinger integrierter Temperatursensor prüft dabei die Oberflächentemperatur. Auch eine ganzheitliche, optische Inspektion der Wellen vor und nach der Wärmebehandlung wird durch die rotierende Lagerung im Greifer deutlich erleichtert.

Bild 1: Modulares Greifersystem im montierten Zustand an einem kollaborierenden Leichtbauroboter, Modifikation des Greifers zum Greifen und Rotieren von Werkstücken für deren geometrische Analyse mithilfe von Lasersensor und paralleler Temperaturmessung. | Quelle: TU Chemnitz
Messungen im Mikrometerbereich
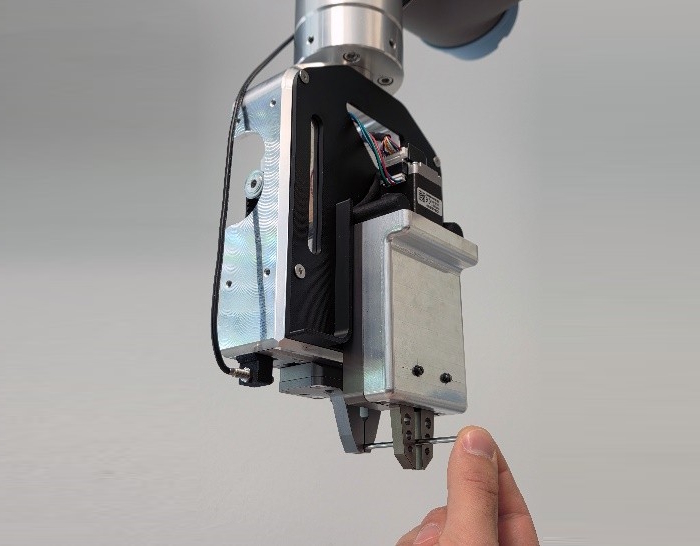
Bei dem zweiten Anwendungsfall geht es um die hochgenaue taktile Vermessung. Dabei prüft das Team unter WGP-Koordination Durchmessertoleranzen im einstelligen Mikrometerbereich. Realisiert werden diese sehr hohen Genauigkeitsanforderungen durch ein eigenständiges Messmodul. Die Wissenschaftler und Wissenschaftlerinnen konnten bereits Wiederholgenauigkeiten im Bereich von einem Mikrometer realisieren. Das stimmt sie hoffnungsfroh für den derzeitigen Prototypen, den sie kontinuierlich weiterentwickeln. So ist noch eine axiale Zustellung des Messmoduls nach dem Greifen der Werkstücke geplant, um die Zugänglichkeit des Greifers weiter zu erhöhen. Auch lassen sich bei dieser Ausbaustufe zusätzlich die Greiffinger vollständig tauschen, sodass eine für das jeweilige Werkstück passende Greifergeometrie genutzt werden kann. Insbesondere für unterschiedlich dimensionierte Bauteilserien bringt das einen deutlichen Mehrwert.
Für die vielfältigen Bewegungen der Greiferkomponenten kommen unterschiedlich dimensionierte Schrittmotoren mit Encodern zum Einsatz. Diese sind vergleichsweise kostengünstig und ermöglichen zugleich eine präzise Positionierung.
Ein weiterer Schwerpunkt des Projekts liegt auf der zuverlässigen Automatisierung des Greifers sowie auf einer möglichst flexiblen Integration in verschiedene Roboterplattformen. Hierfür wird zum einen industrielle Automatisierungstechnik verwendet, bestehend aus Schrittmotorklemmen und einem Industrie-PC (IPC). Zum anderen erfolgt die Kommunikation zwischen Roboter und Greifersteuerung über TCP/IP, wodurch eine breite Kompatibilität mit gängigen Robotersystemen gewährleistet wird.
Das Projekt GRIP wird im Rahmen des Zentralen Innovationsprogramms Mittelstand (ZIM) vom Bundesministerium für Wirtschaft und Energie aufgrund eines Beschlusses des Deutschen Bundestages gefördert.
Weiterführende Informationen:
https://www.tu-chemnitz.de/mb/psp/forschung/projekte.php
Förderer:
Bundesministerium für Wirtschaft und Energie (BMWE)
Ansprechpartner:
Institut für Werkzeugmaschinen und Produktionsprozesse (IWP)
TU Chemnitz
Prof. Martin Dix
Professur Produktionssysteme und -prozesse
Tel.: +49 371 53123500
E-Mail: martin.dix@mb.tu-chemnitz.de
Dr. Matthias Rehm
Geschäftsführender Oberingenieur
Tel.: +49 371 53137447
E-Mail: matthias.rehm@mb.tu-chemnitz.de
Downloads:
Modulares Greifersystem im montierten Zustand an einem kollaborierenden Leichtbauroboter, Greifen des zu prüfenden Präzisionswerkstücks zur Vorbereitung der taktilen Messung mithilfe eines separaten Messmoduls | Quelle: TU Chemnitz
Modulares Greifersystem im montierten Zustand an einem kollaborierenden Leichtbauroboter, Modifikation des Greifers zum Greifen und Rotieren von Werkstücken für deren geometrische Analyse mithilfe von Lasersensor und paralleler Temperaturmessung. | Quelle: TU Chemnitz