
Konventionelle Industrieroboter sind oft nur auf den Millimeter absolut genau. Neue Kalibrierverfahren verknüpfen physikalische Modelle mit KI-Ansätzen. Durch die Kompensation von Getriebeungenauigkeiten und thermischen Einflüssen lässt sich der Fehler auf wenige hundert Mikrometer reduzieren und damit neue Anwendungsfelder erschließen.
Juni 2026 – Industrieroboter sind in der Anschaffung kostengünstiger als Werkzeugmaschinen und haben gleichzeitig einen großen und frei erreichbaren Arbeitsraum. Dadurch ist die theoretische Flexibilität höher als die von Werkzeugmaschinen. Weiterhin verfügen Roboter über eine hohe Wiederholgenauigkeit. Das bedeutet: Ein bekannter Punkt kann im Sub-Zehntelmillimeterbereich genau wiederholt angefahren werden. Anders sieht jedoch die Absolutgenauigkeit aus. Soll der Roboter einen beliebigen Punkt im Arbeitsraum anfahren, so schwankt die Genauigkeit im Bereich mehrerer Millimeter. Grund hierfür sind Fehler in den Achsen, Getrieben und der Struktur, die sich aufsummieren. Um dieses Problem zu überwinden, gibt es drei Möglichkeiten: Einlernen, zusätzliche Hardware oder die Kalibrierung.
Beim Einlernen wird das Roboterprogramm durch manuelles Verfahren gespeichert. Bei sich wiederholenden Prozessen kann der Roboter die eingelernte Bahn mit hoher Wiederholgenauigkeit abfahren. Hierbei ist die Flexibilität aber eingeschränkt, da bei Prozessänderung der manuelle Aufwand wiederholt werden muss.
Die Verwendung von zusätzlicher Hardware bietet die höchste Flexibilität. Dabei werden zusätzliche Sensoren oder Aktoren stationär verbaut, wodurch jedoch der regelungs- und steuerungstechnische Aufwand sowie die Anschaffungskosten steigen. In vielen Fällen ist daher eine Werkzeugmaschine die bessere Option.
Neue Anwendungsfelder denkbar
Bei der Kalibrierung wird der Roboter präzise vermessen, beispielsweise mittels Lasertracker. Fehlerhafte Größen wie Gelenkwinkelabstände und Winkelversätze werden damit korrigiert. Herkömmliche Kalibrieransätze stoßen bei Robotern mit großem Arbeitsraum jedoch an ihre Grenzen, da positionsabhängige Nichtlinearitäten stärker zum Tragen kommen. Am WGP-Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (ISW) der Universität Stuttgart wird daher an neuartigen Kalibriermethoden geforscht, die diese Problematik adressieren. Ziel ist es, dass Industrieroboter flexibler und prozessadaptiver genutzt und weitere Anwendungsfelder erschlossen werden können. Denkbar sind Prozesse in der Aerospace-Fertigung, präzises Handling bei der Batteriefertigung, Nieten und der Einsatz eines Roboters als Messmaschine. Am ISW werden daher drei Ansätze verfolgt, mit denen die Genauigkeit gesteigert wird.
Nachgiebigkeitskalibrierung
Industrieroboter müssen dauerhaft ihre Eigenlast und das Gewicht eines möglichen Bauteils tragen. Diese positionsabhängige Last hat zur Folge, dass ein Winkelfehler zwischen Motor und Gelenk auftritt. Klassischerweise kann dieser Winkelfehler über das Gewicht und den Nachgiebigkeitsfaktor des Getriebes berechnet und kompensiert werden. Untersuchungen ergaben jedoch, dass dieser Nachgiebigkeitsfaktor bei großen Industrierobotern stark nichtlinear ist. Gründe hierfür sind positionsabhängige Reibung und der nichtlineare Einfluss des Gewichtsausgleichs. Am ISW wurde deshalb ein Greybox-Modell entwickelt, wodurch die Modellgüte um 23 Prozent im Vergleich zum Stand der Technik verbessert werden konnte. Zur Nachgiebigkeitskalibrierung hat das Forscherteam die industrielle Praktikabilität nachgewiesen (s. weitere Informationen).
Thermale Driftkompensation
Thermische Ausdehnungsprozesse sind im Allgemeinen nur schwer analytisch und physikalisch modellierbar. Neben dem Einsatz klimatisierter Fertigungsstraßen trägt auch ein kontrolliertes „Warmfahren“ zur Verringerung des Effekts bei. Dieses Vorgehen ist aber nicht prozessadaptiv, weshalb sich bei Änderung des Prozesses auch die thermischen Ausprägungen ändern. Aus diesem Grund werden Methoden untersucht, bei denen eine Vielzahl von Temperatursensoren verwendet werden. Mittels lernender Verfahren wird ein Modell bestimmt, welches den Positionierfehler verringert. Bei Verschleiß oder Prozessänderungen wird das Modell automatisch nachtrainiert. Mit dieser Methode steigt die Flexibilität bei Prozessänderung, es kann auf das Warmfahren verzichtet werden. Weiterhin könnte bei manchen Anwendungen auch die ressourcenintensive Klimatisierung obsolet werden. Ergebnisse zu diesem Ansatz will das Team bis Mitte / Ende 2027 präsentieren.
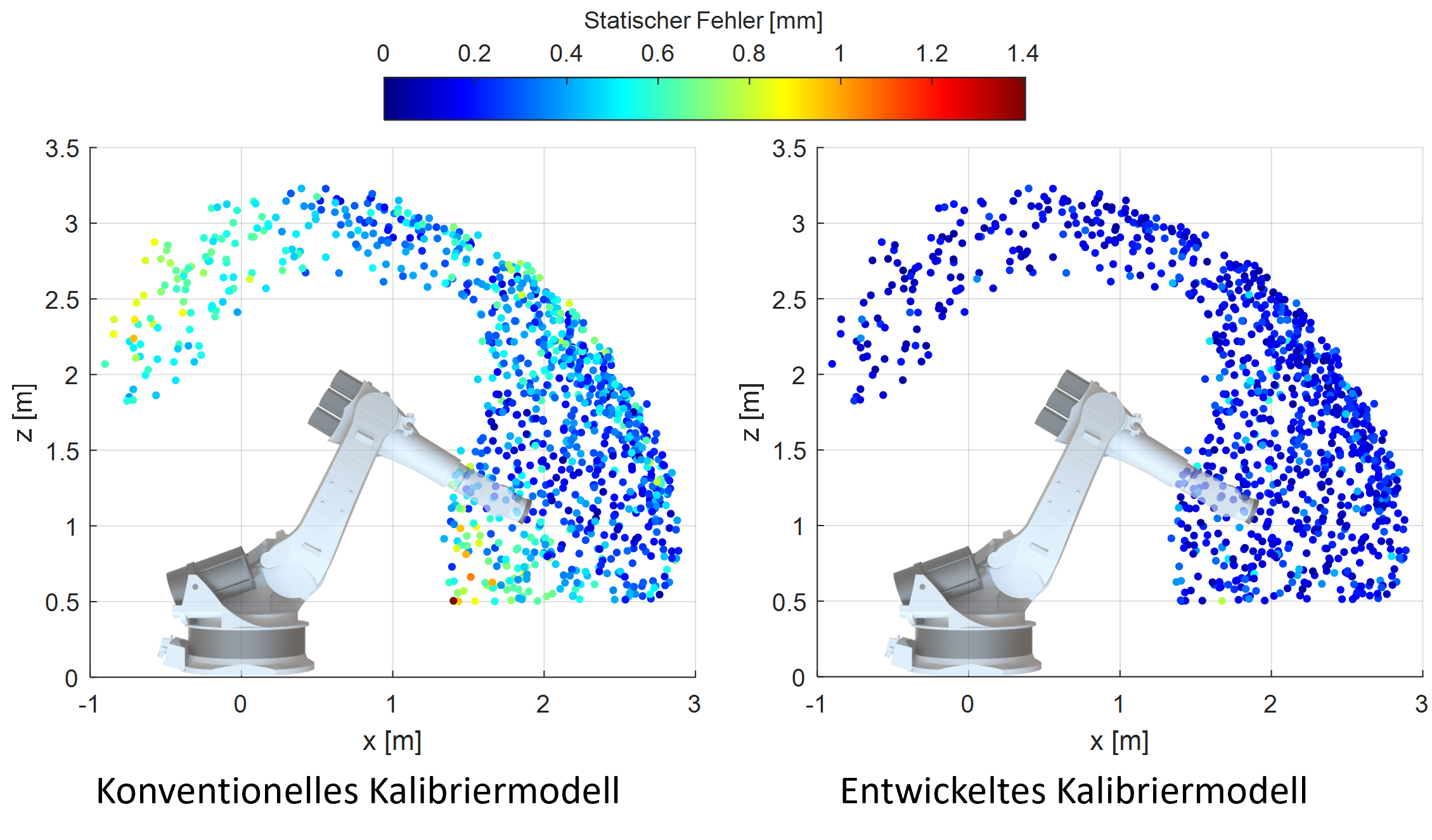
Bild 1: Genauigkeitssteigerung durch das entwickelte Nachgiebigkeitsmodell | Quelle: ISW Uni Stuttgart
Feature-Based-Kinematics
Neben Nachgiebigkeitsfehlern können sich kinematische Größen wie Verkippungen, Dehnungen oder Stauchungen der Komponenten ebenfalls posenabhängig ändern. Jedoch existieren hier keine praktikablen physikalischen Modelle zur Kompensation. Greybox-Ansätze versprechen hierbei ein hohes Potenzial: Ansatzfunktionen (Features) sollen verwendet werden, um kinematische Größen noch genauer beschreiben zu können. Mittels Lasertracker soll ein 6D-Modell des Roboters bestimmt werden. Der Restfehler des geometrisch-physikalischen Modells wird datengetrieben über die Features minimiert. Dadurch soll der erhoffte mittlere Restfehler unter 100 µm liegen. Auch zu diesem Projekt soll es Ergebnisse bis Mitte / Ende kommenden Jahres geben.
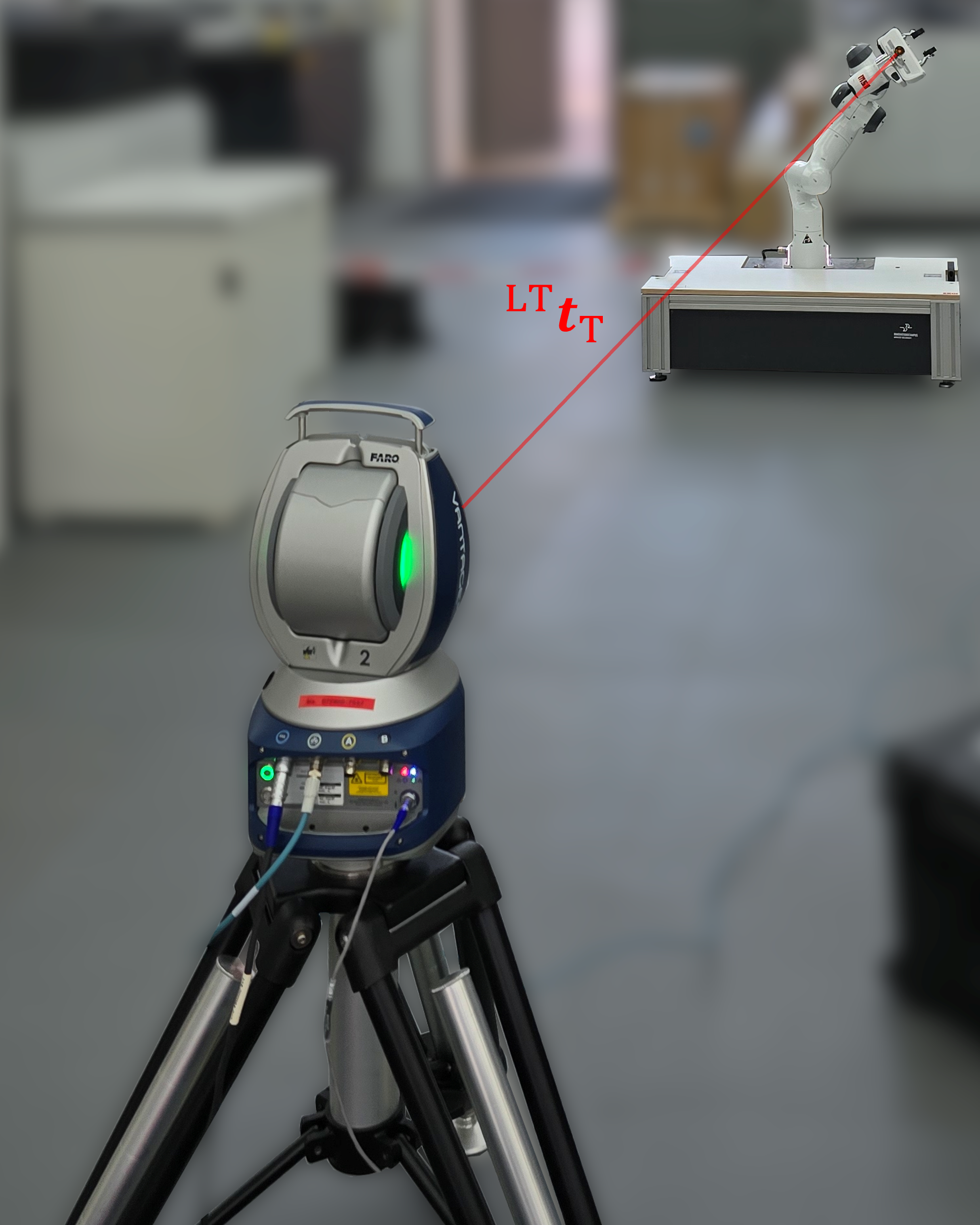
Bild 2: Mikrometergenaue Bestimmung der Roboterpose mittels Lasertracker | Quelle: ISW Uni Stuttgart
Weiterführende Informationen:
https://www.isw.uni-stuttgart.de/
https://doi.org/10.1109/TASE.2025.3559673
Nachgiebigkeitskalibrierung:
https://doi.org/10.1109/TASE.2025.355967
Förderer:
Gefördert durch die Deutsche Forschungsgemeinschaft (DFG) – Projektnummern 497511198 und 562367049.
Ansprechpartner:
Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (ISW)
Universität Stuttgart
Prof. Alexander Verl
Institutsleiter
Tel.: +49 711 68582422
E-Mail: alexander.verl@isw.uni-stuttgart.de
Marcel Dzubba
Wissenschaftlicher Mitarbeiter
Tel.: +49 711 68584504
E-Mail: marcel.dzubba@isw.uni-stuttgart.de
Downloads:
Hochpräzise Kalibrierung von Industrierobotern mittels Lasertracker | Quelle: ISW Uni Stuttgart
Genauigkeitssteigerung durch das entwickelte Nachgiebigkeitsmodell | Quelle: ISW Uni Stuttgart
Mikrometergenaue Bestimmung der Roboterpose mittels Lasertracker | Quelle: ISW Uni Stuttgart