Wie können Roboter fragile oder flexible Objekte schneller bewegen, ohne Schwingungen auszulösen? Ein neues Sim-to-Real-Framework der WGP verbindet Reinforcement Learning, Simulation und reale Robotertests.
Juni 2026 – In vielen Produktionsprozessen müssen Roboter Bauteile schnell, präzise und zuverlässig bewegen. Bei starren Werkstücken ist diese Aufgabe bereits gut beherrschbar. Komplexer wird es, wenn das transportierte Objekt flexibel, deformierbar oder empfindlich ist, etwa bei weichen Materialien oder fragilen Bauteilen. Um solche Objekte bei schnellen Pick-and-Place-Aufgaben nicht zu beschädigen, werden Robotergeschwindigkeiten in vielen Fällen bewusst begrenzt. Dadurch bleibt ein Teil der verfügbaren Leistungsfähigkeit des Roboters ungenutzt. Gleichzeitig können schnelle Bewegungen Schwingungen verursachen, die die Wartezeit bis zum nächsten Prozessschritt verlängern, die Genauigkeit verschlechtern und zusätzlich zu Beschädigungen am Objekt führen können.
Zur Minimierung solcher Schwingungen existieren bereits bewährte Verfahren. Ein bekanntes Beispiel ist das sogenannte Input Shaping, bei dem das Bewegungssignal gefiltert wird, sodass Restschwingungen reduziert werden. Dieses Verfahren kann sehr wirksam sein, benötigt jedoch meist Vorwissen über die dominanten Eigenfrequenzen der Last. Wenn sich Masse, Geometrie oder Materialeigenschaften ändern, muss die Auslegung entsprechend angepasst werden. Genau an dieser Stelle setzen die Forschenden der WGP an.
Lastverhalten mit KI verstehen und optimieren
Das Projekt untersucht, wie Roboterbewegungen mithilfe von Reinforcement Learning (RL) schwingungsärmer gestaltet werden können. Ein RL-Modell lernt in einer physikalischen Simulation, wie die Geschwindigkeit entlang einer vorgegebenen Roboterbahn angepasst werden kann. Die Bahn besteht weiterhin aus definierten Wegpunkten, wie sie auch in industriellen Roboterprogrammen verwendet werden. Die Herausforderung besteht darin, nicht nur die Zielpositionen zu berücksichtigen, sondern auch die dynamische Reaktion des transportierten Objekts. Ziel ist es, ein Bewegungsprofil zu bestimmen, das Schwingungen reduziert und gleichzeitig kurze Zykluszeiten ermöglicht.
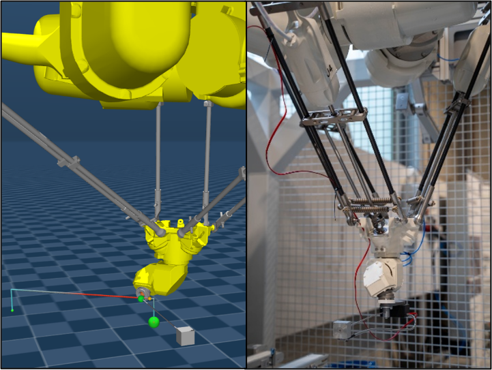
Bild 1: Die Sim-to-Real-Pipeline überträgt in der Simulation erzeugte Bewegungsprofile auf einen industriellen FANUC-Robotersteuerung. | Quelle: LPS
Ein wichtiger Bestandteil ist die Analyse der sogenannten Sim-to-Real-Lücken. Damit sind Abweichungen gemeint, die entstehen können, wenn eine in der Simulation erzeugte Bewegung auf einen realen Roboter übertragen wird. Dazu zählen die Diskretisierung der Geschwindigkeitsprofile, Unterschiede zwischen virtueller und realer Robotersteuerung sowie Abweichungen zwischen simuliertem und realem Schwingungsverhalten des Objekts. Diese Unterscheidung hilft, spätere Messergebnisse besser einzuordnen und zentrale Fehlerquellen gezielt zu untersuchen.
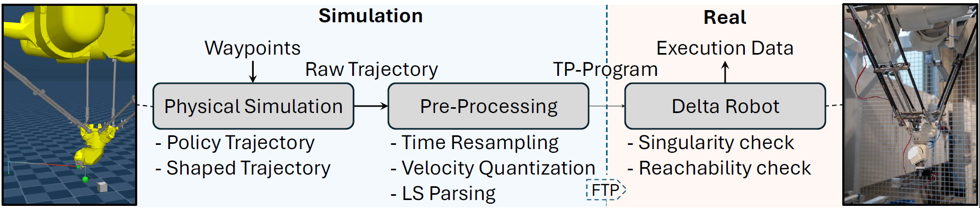
Bild 2: Die Sim-to-Real-Pipeline überträgt in der Simulation erzeugte Bewegungsprofile auf einen industriellen FANUC-Robotersteuerung. | Quelle: LPS
Der lernbasierte Ansatz wird mit zwei Vergleichsstrategien bewertet: einer klassischen wegpunktbasierten Bahnplanung und einer durch Input Shaping angepassten Bahnplanung. Damit wird er sowohl mit einer typischen industriellen Referenz als auch mit einem etablierten Verfahren zur Schwingungsreduzierung verglichen.
Die bisherige Arbeit schafft eine Grundlage für die systematische experimentelle Bewertung. In den nächsten Schritten sollen Schwingungsreduktion, Zykluszeit und Sim-to-Real-Lücken quantitativ untersucht werden. Langfristig kann der Ansatz dazu beitragen, Roboterbahnen für flexible, deformierbare oder fragile Objekte effizienter und sicherer zu generieren.
Förderer:
Deutsche Forschungsgemeinschaft (DFG)
Forschungsprojekt: Einsatz von Verstärkungslernen für eine effiziente Bahnplanung von parallelen Robotern bei der Handhabung biegeschlaffer Objekte
Projektnummer: 555175075
Ansprechpartner:
Lehrstuhl für Produktionssysteme (LPS)
Ruhr-Universität Bochum
Prof. Bernd Kuhlenkötter
Institutsleiter
Tel.: +49 234 3226310
E-Mail: kuhlenkoetter@lps.rub.de
Victor Caldas
Wissenschaftlicher Mitarbeiter
Tel.: +49 234 3215532
E-Mail: caldas@lps.rub.de
Downloads:
Projektteam (v. l. n. r.): Matthias Pallasch, Victor Caldas, Michael Miro, Bernd Kuhlenkötter und Tobias Glasmachers beim Kick-off-Treffen. | Quelle: LPS Bochum
Versuchsaufbau zur Analyse des Schwingungsverhaltens: Durch eine variable Lastspitze werden unterschiedliche Szenarien simuliert, um optimierte Bewegungsbahnen zur Schwingungsreduktion zu entwickeln. | Quelle: LPS Bochum
Die Sim-to-Real-Pipeline überträgt in der Simulation erzeugte Bewegungsprofile auf einen industriellen FANUC-Robotersteuerung. | Quelle: LPS Bochum