Die Verdrahtung von Schaltschränken zählt zu den arbeitsintensivsten und fehleranfälligsten Prozessschritten in der industriellen Fertigung. Die WGP arbeitet daher mit KaiROS an der automatisierten Montage der Kabel. Für die innovative Schaltschrankfertigung bedienen sie sich intelligenter Robotik.
Juni 2026 – Obwohl Schaltschränke eine zentrale Grundlage moderner Automatisierungslösungen bilden, ist ihre Montage, insbesondere die individuelle Kabelverlegung und Kontaktierung, bis heute überwiegend manuell geprägt. Das zu ändern, haben sich Forschende am WGP-Institut Werkzeugmaschinenlabor (WZL) der RWTH Aachen zum Ziel gesetzt und entwickeln ein modulares Framework zur automatisierten Kabelmontage.
Ausgangspunkt ist die hohe wirtschaftliche Relevanz des Anwendungsfelds. Die Verdrahtung nimmt im Schaltschrankbau einen erheblichen Anteil der gesamten Fertigungszeit ein. Ein wesentlicher Zeitaufwand entsteht nicht allein durch das eigentliche Verlegen und Kontaktieren der Leitungen, sondern bereits durch das wiederholte Auswerten von Stromlaufplänen, das Identifizieren von Quelle und Ziel eines Kabels sowie das Lokalisieren der zugehörigen Komponenten im Schaltschrank. Hinzu kommen hohe Produktvarianz, kleine Losgrößen, steigende Qualitätsanforderungen und der zunehmender Fachkräftemangel. Gerade diese Randbedingungen erschweren den wirtschaftlichen Einsatz konventioneller, starr programmierter Automatisierungslösungen erheblich. KaiROS adressiert diese Lücke mit einem Ansatz, der Informationsextraktion, Simulation und KI-basierte Handhabungsstrategien systematisch zusammenführt.
Digitale Beschreibung des Sollzustands
Der erste methodische Schwerpunkt liegt auf Extraktion und Zusammenführung von Verkabelungsinformationen. Relevante Angaben aus Stromlaufplänen und Verdrahtungslisten, wie z.B. zu Quelle, Ziel und Leitungsmerkmalen, werden automatisiert in eine maschinenlesbare Form überführt. Diese Informationen werden anschließend mit Bilddaten aus dem realen Schaltschrank zusammengeführt, um Komponenten, Anschlussklemmen und ihre räumliche Lage eindeutig zu erfassen. Auf diese Weise entsteht eine konsistente digitale Beschreibung des Sollzustands als Grundlage für die nachgelagerten robotischen Handhabungs- und Montageprozesse.
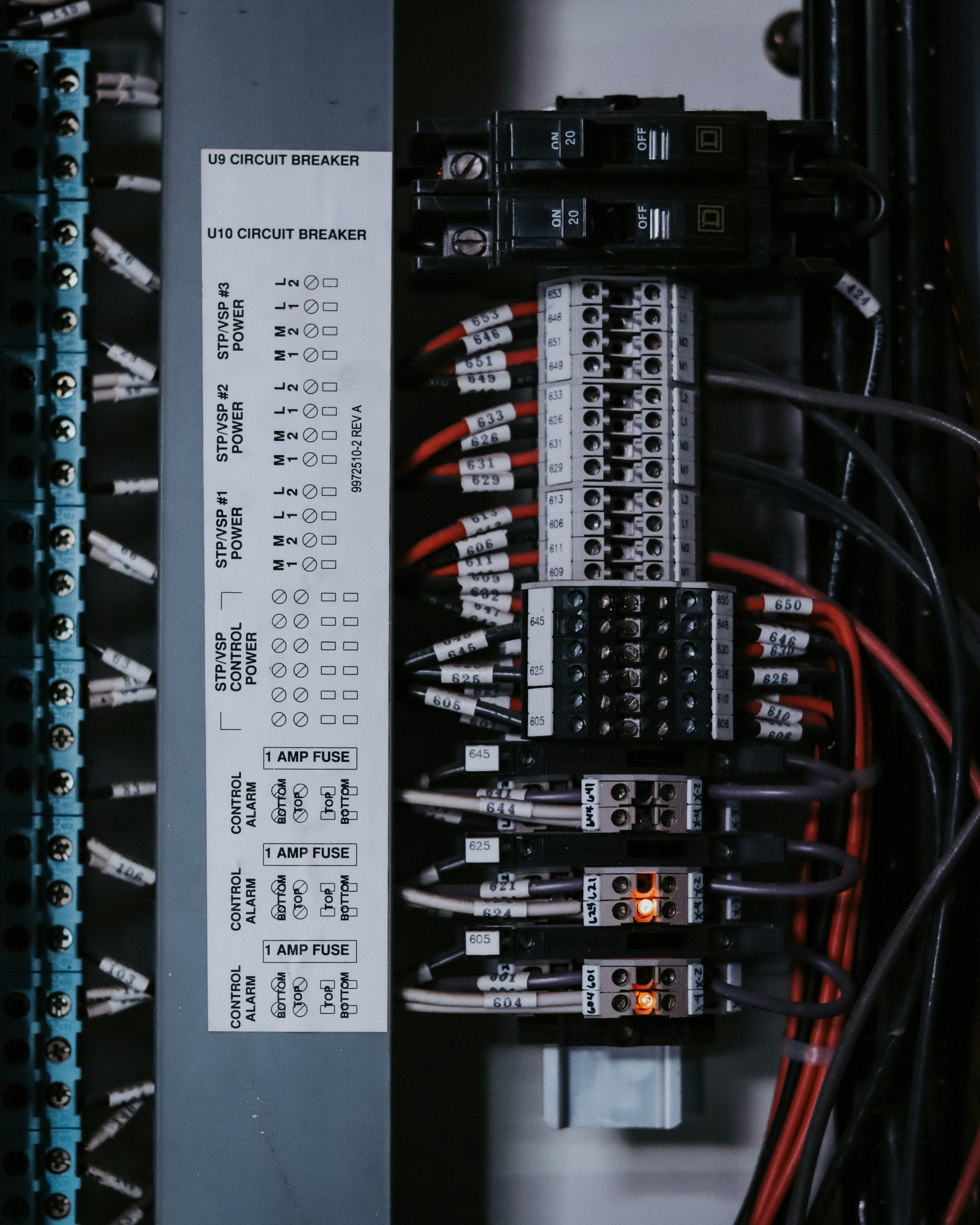
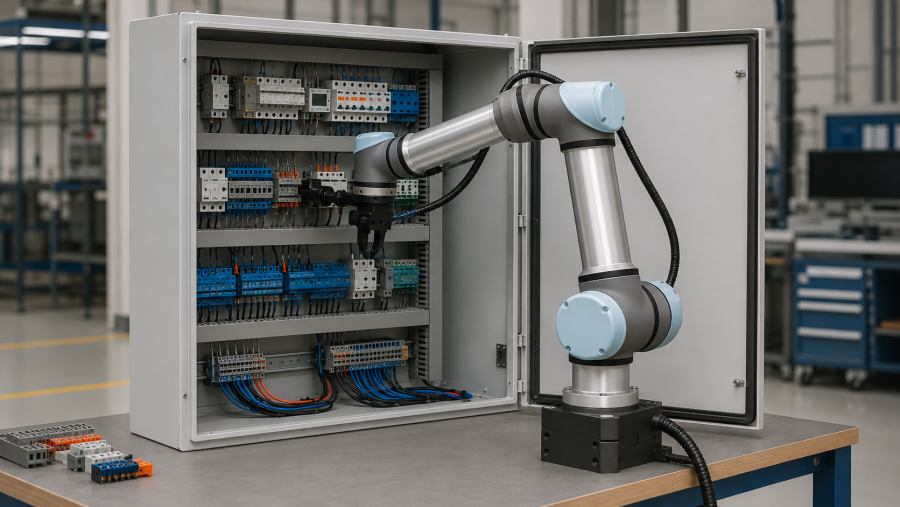
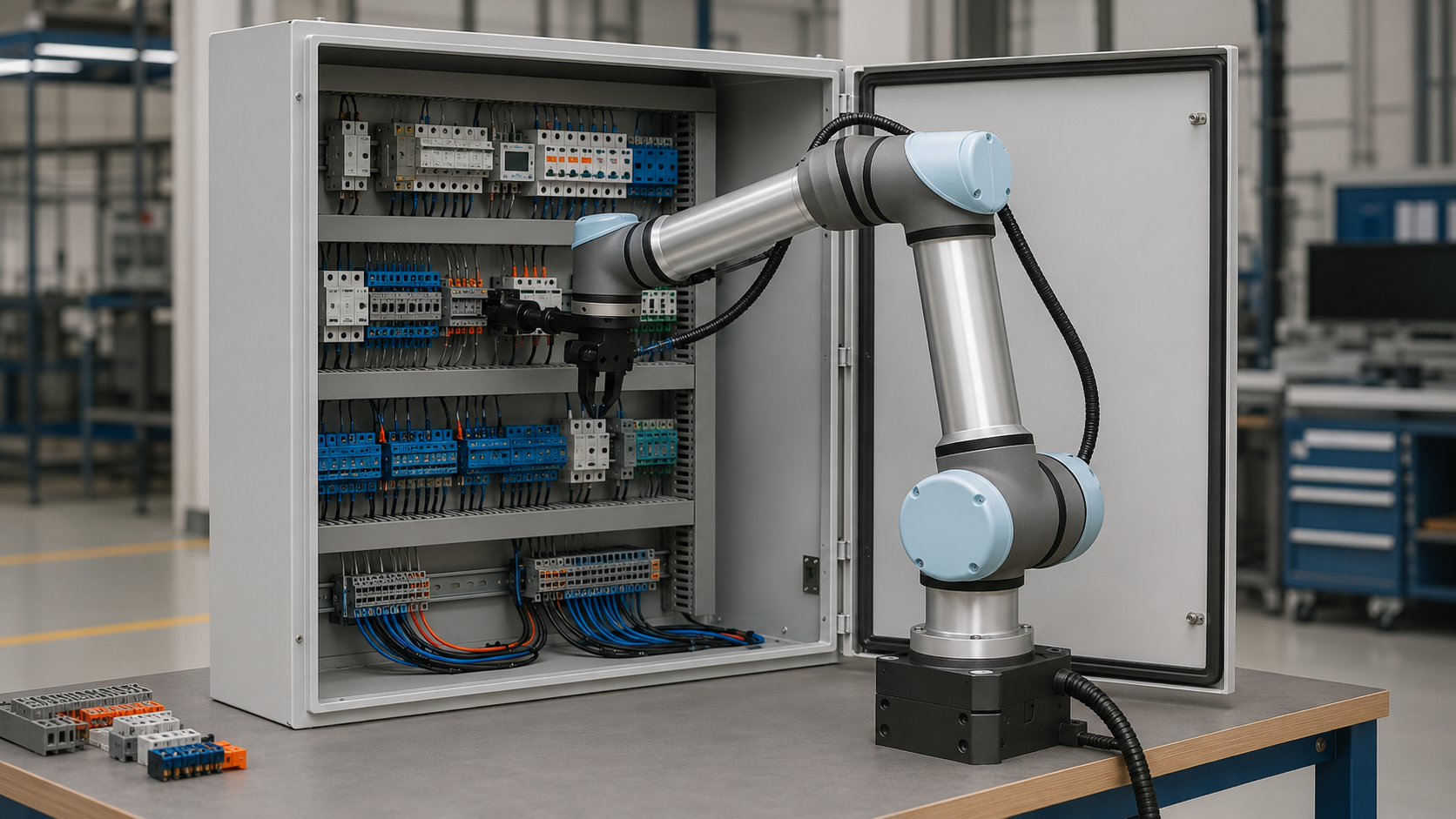
Bild 1: Schaltschrank, Quelle: WZL Aachen | Bruno Guerrero, Unsplash
Das Problem der Biegeschlaffheit
Der zweite Schwerpunkt betrifft die Modellierung und Simulation biegeschlaffer Leitungssätze. Gerade die Handhabung von Kabeln stellt für robotische Systeme eine erhebliche Herausforderung dar, da sich diese Objekte aufgrund ihrer Nachgiebigkeit kontinuierlich verformen und ihr Verhalten nur eingeschränkt deterministisch vorhersagbar ist. In KaiROS sollen deshalb Simulationsmodelle entwickelt werden, die das Verhalten von Kabeln, Steckverbindungen und Schaltschrankumgebung hinreichend realitätsnah abbilden und gleichzeitig recheneffizient genug für das Training lernender Verfahren bleiben. Diese Simulationsumgebung bildet die Grundlage für ein simulationsgestütztes Training von KI-Modulen und ist damit ein zentraler Hebel, um Entwicklungsaufwand, Anlagenstillstand und Datenmangel zu reduzieren. Domänen-Randomisierung als eine Technik im maschinellen Lernen soll dabei helfen, die Übertragbarkeit der in der Simulation gelernten Strategien auf reale Anwendungen zu verbessern.
Lösungen insbesondere für Mittelständler
Darauf aufbauend fokussiert der dritte Schwerpunkt KI-basierte Verfahren für das Greifen, Führen und Fügen von Kabeln und Steckern. Während für starre Bauteile bereits belastbare Ansätze existieren, steigt die Komplexität bei biegeschlaffen Objekten erheblich: Kabel können sich überlagern, verhaken, ihre Lage dynamisch verändern und sind oft nur eingeschränkt sichtbar. Im Projekt werden daher Strategien zur Greifpunktidentifikation, zur adaptiven Bewegungsplanung sowie zum sensitiven Fügen entwickelt. Zum Einsatz kommen Ansätze wie Imitation Learning und Reinforcement Learning, die auf Basis simulativer Trainingsumgebungen robuste Handhabungsstrategien erlernen sollen. Besonders relevant ist dabei die Kombination aus visueller Wahrnehmung und Kraft- bzw. Momentensensorik, um auch bei engen Toleranzen oder eingeschränkter Sicht prozesssicher agieren zu können.
Mit dem Schaltschrankbau in KaiROS ein bislang nur schwer automatisierbares Montagefeld adressiert. Im Fokus steht die Frage, wie sich auch bei kleinen Stückzahlen und hoher Variantenvielfalt robotergestützte Lösungen wirtschaftlich einsetzen lassen. Damit richtet sich das Vorhaben insbesondere an die Anforderungen mittelständisch geprägter Fertigungsumgebungen. Über den Schaltschrankbau hinaus sind die Ergebnisse auch für weitere Anwendungen mit biegeschlaffen Bauteilen interessant. Dazu zählen insbesondere Montage- und Handhabungsaufgaben, bei denen flexible Leitungen, Kabel oder ähnliche Strukturen verarbeitet werden. KaiROS liefert hierfür methodische Ansätze in den Bereichen Wahrnehmung, Simulation und Handhabung.
Ansprechpartner:
Werkzeugmaschinenlabor (WZL)
RWTH Aachen
Prof. Christian Brecher
Lehrstuhlinhaber
Tel.: +49 241 8027407
E-Mail: c.brecher@wzl.rwth-aachen.de
Emma Heyen
Wissenschaftliche Mitarbeiterin
Tel.: +49 241 8028227
E-Mail: e.heyen@wzl.rwth-aachen.de
Downloads:
{kind=link}
Roboterarm bei der KI-gestützten Montage eines Schaltschranks | Quelle: schematisch, KI-generiert
Schaltschrank Schaltschrank | Quelle: Bruno Guerrero, Unsplash