
Fahrerlose Transportsysteme, die zentral gesteuert Aufgaben erledigen, aber auch auf Befehle von Mitarbeitern hören: Forscher aus Chemnitz schufen intelligente Helfer, um eine intuitive Zusammenarbeit von Mensch und Maschine zu realisieren. Die Lastenträger hören auf die Smartwatch ihrer menschlichen Kollegen. Realisiert wurden die FTF mithilfe virtueller Methoden.
Dezember 2018 – Experten glauben, dass es in der Industrie in Zukunft jährlich 10 Prozent mehr fahrerlose Transportfahrzeuge (FTF) geben wird (Quelle: Compound Annual Growth Rate des Marktes nach einer Studie von MarketsandMarkets, s.u.) und davon fahren viele noch auf Induktionsschienen durch die Produktionshallen. Die Forscher des Instituts für Werkzeugmaschinen und Produktionsprozesse (IWP) der TU Chemnitz haben im Rahmen des BMBF-Forschungsprojektes FOLLOWme nun gemeinsam mit der SICK AG, der LIVINGSOLIDS und der iFD GmbH einen Demonstrator entwickelt, der sich völlig frei durch die Gänge bewegt und unabhängig von fixen Landmarken navigiert. Seine Befehle erhält das Gefährt zentral über einen Flottenmanager, der es nicht nur autonom von A nach B schickt, sondern auch Kollege Mayer zur Unterstützung zuteilen kann. Dann hilft Ihm das FTF zum Beispiel beim Transport von 40 neuen iPhones von Halle C in Halle D, die schon dringend erwartet werden. Hierzu folgt es Herrn Mayer auf dem Fuße. Ermöglicht wird das durch einen modernen Trackingalgorithmus, welcher den Menschen im Kamerabild findet und seine Position errechnet.
Die komplette Mannschaft – ob Mensch oder Maschine – ist mittels des globalen Flottenmanagers an ein übergeordnetes Warehouse-Management-System angebunden, welches Transportaufgaben intelligent auf die entsprechenden Werker und FTF verteilt. Die aktuellen Hallenzustände bildet es zur Steuerung und Simulation als 3D-Visualisierung ab.
Um frühzeitig Fahrfunktionen zu testen und mögliche Hardware zu untersuchen, werden bei der Entwicklung extensiv virtuelle Techniken verwendet. Das heißt: Mittels Virtual Reality sind die Modelle 1:1 wie in einem 3D-Kino darstellbar und können maßstabgetreu in der Halle bewegt werden – ganz so als wären sie physisch vorhanden.
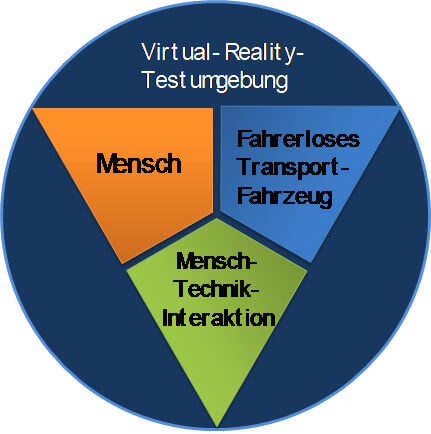
Virtual-Reality-Testumgebung
„Bei der Entwicklung der Fahrzeuge – etwa der Mensch-Maschine Interaktion – haben wir darauf Wert gelegt, dass sie den Bedürfnissen moderner Logistik, aber auch dem Werker gerecht werden“, erläutert Christoph Allmacher, Projektbearbeiter bei FOLLOWme. „In Studien wurden vorab virtuell unterschiedliche Technologien, wie Augmented-Reality-Brillen, Smartwatches oder Pick-by-Voice Systeme getestet. Es war uns wichtig, dass der Mitarbeiter das Gerät nicht halten muss und dadurch die Hände frei hat.“ Diese Studien fanden in der Virtual-Reality-Testumgebung statt.
Virtual-Reality-Testumgebung
Die Virtual-Reality-Testumgebung ermöglicht eine durchgehende, menschzentrierte Produktentwicklung des FTF. Im Zentrum der Entwicklung werden die Schnittstellen zwischen Mensch, FTF und den vom Menschen genutzten Kommunikationsmedien innerhalb der Virtual-Reality-Testumgebung abgebildet, detailliert und bereits ohne komplett existierende physische Bauteile getestet. Dadurch konnte sich bei den Tests der Interaktionstechniken schon frühzeitig für die Smartwatch entschieden werden.
Virtuelle Inbetriebnahme der Steuerungssoftware
Die Virtual-Reality-Testumgebung ermöglicht darüber hinaus das frühzeitige Testen der FTF-Steuerungssoftware und ihrer Fahrfunktionen schon vor Bau des ersten Prototyps. Um die zugrundeliegenden Algorithmen und ihr Zusammenspiel zu untersuchen, werden Sensoren und Aktoren des FTF innerhalb der Virtual-Reality-Testumgebung simuliert. Nach dem Prinzip Hardware-in-the-Loop ist die reale Steuerung an die simulierten Komponenten gekoppelt.
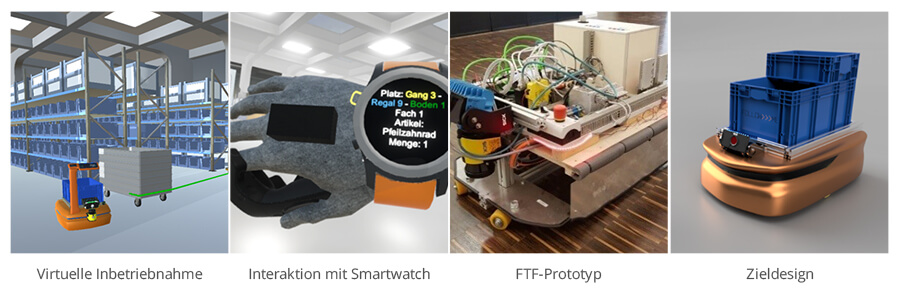
Virtuelle Inbetriebnahme der Steuerungssoftware – Quelle: IWP Chemnitz
Dadurch „denkt“ die Steuerung, sie würden mit den realen Sensoren und Aktoren kommunizieren. Die Sensoren übermitteln die generierten Messdaten (grüne Laserlinie im linken Bild) über eine Netzwerkschnittstelle an die Steuerungssoftware, welche am Ende der Kette wiederum die simulierten Aktoren ansteuert. Durch das frühzeitige Aufdecken von Fehlern und Validieren von Konzepten, kann die reale Inbetriebnahme erheblich verkürzt werden. Der Einsatz virtueller Techniken hat im Projekt FOLLOWme die Entwicklung des FTFs maßgeblich unterstützt und geprägt. Zukünftig wollen die Forscher am IWP dieses Know-how maßgeschneidert für FTF methodisch aufbereiten, um die Entwicklung neuer FTF-Generationen zu unterstützen.
Beitragsbilder: IWP, TU Chemnitz
Mehr Informationen
FOLLOWme: https://followme-ils.com
Compound Annual Growth Rate des Marktes: https://www.marketsandmarkets.com/Market-Reports/automated-guided-vehicle-market-27462395.html
Förderer
Das Forschungsprojekt “FOLLOWme ILS – Intralogistiksystem mit Fahrerlosen-Transport-Systemen” (Förderkennzeichen: 03ZZ0428D) wird vom Bundesministerium für Bildung und Forschung unterstützt. Laufzeit: März 2016 bis Februar 2019.
Ansprechpartner
IWP Institut für Werkzeugmaschinen und Produktionsprozesse
Technische Universität Chemnitz
Prof. Reimund Neugebauer
Tel.: +49 371 531-23500
E-Mail: reimund.neugebauer@zv.fraunhofer.de
Prof. Matthias Putz
Wahrnehmung der Professur
Tel.: +49 371 531-23500
E-Mail: wzm@mb.tu-chemnitz.de
Dipl.-Ing. Christoph Allmacher
Projektbearbeiter FollowMe
Tel.: +49 371 531-32036
E-Mail: christoph.allmacher@mb.tu-chemnitz.de
Dr. Philipp Klimant
Oberingenieur Forschung
Tel.: +49 371 531-36911
E-Mail: philipp.klimant@mb.tu-chemnitz.de