
Maßnahmen zum Schutz des Menschen können die Taktzeit einer Roboteranwendung stark erhöhen. Die Robo-Dashcam sorgt für die notwendige Sicherheit bei um 5 bis 10 Prozent erhöhter Produktivität. Sie erfasst datenschutzkonform sicherheitsrelevante Daten und Personen, während die Roboterzelle in Betrieb ist. Basierend darauf kann das Sicherheitskonzept angepasst werden.
Dezember 2023 – Eine Risikobeurteilung für kollaborierende Roboteranwendungen ist in der Regel zeitaufwändig und komplex. Wenn dann schließlich ein Sicherheitskonzept erstellt wurde, ist das Ergebnis häufig nicht optimal: Weil in der Planungsphase Informationen fehlen, müssen Worst-Case-Annahmen, beispielsweise bei Sicherheitsabständen und Annäherungsgeschwindigkeiten, getroffen werden. So sind resultierende Sicherheitskonzepte vielfach zu konservativ. Dies hat übermäßige Einschränkungen bei Geschwindigkeit und Zykluszeit des Roboters zur Folge, was zu Leistungs- und Produktivitätsverlusten führt. Eine bessere Einschätzung der sicherheitsrelevanten Parameter ist in der Regel erst möglich, wenn das Robotersystem aufgebaut und in Betrieb genommen wurde und erste Erfahrungen mit der Anlage gesammelt wurden. Zu diesem Zeitpunkt wird der Prozess der Risikobeurteilung allerdings in der Regel als abgeschlossen betrachtet und es werden keine weiteren Optimierungen vorgenommen.
An dieser Stelle setzt das Institut des WGP-Professors Thomas Bauernhansl an: Das Tool Robo-Dashcam protokolliert sicherheitsrelevante Daten im Betrieb und wertet sie über einen längeren Zeitraum hinweg aus. Dadurch werden Ursachen für eine geringe Performance identifiziert und Ansätze zur Optimierung ermittelt.
Das Herzstück der Robo-Dashcam ist ein Kamerasystem, mit dem die Position und Geschwindigkeit des Menschen im Arbeitsraum des kollaborativen Roboters verfolgt werden. So wird ermittelt, wie häufig sich der Mensch dem Roboter nähert, wenn er beispielsweise Teile entnimmt oder einlegt oder Kisten mit Material an der Roboterzelle wechselt. Auch die zeitliche Auswertung ist möglich, um beispielsweise Tageszeiten zu erkennen, zu denen besonders häufig ein Mensch in den kollaborativen Arbeitsraum eintritt.
Neben den visuellen Daten wird auch die Auslösung von Sicherheitssensoren erfasst, die beispielsweise einen Sicherheitsstopp oder eine reduzierte Robotergeschwindigkeit bewirken. Basierend auf den aufgenommenen Daten generiert die Robo-Dashcam Vorschläge für eine Optimierung der Sicherheitskonfiguration. So kann beispielsweise ein kleineres Schutzfeld zwar eine verringerte Robotergeschwindigkeit erfordern, andererseits aber auch zu weniger Sicherheitsstopps führen, sodass die durchschnittliche Bewegungsgeschwindigkeit des Roboters insgesamt höher ausfällt.
Um dem Datenschutz gerecht zu werden, erfolgt die Erfassung in anonymisierter Form, indem lediglich verarbeitete Daten wie die Position von Oberkörper und Händen gespeichert werden. Die Rohdaten der Kameras werden unmittelbar nach der Aufnahme wieder verworfen. Die statistische Mittelung erschwert auch eine zeitliche Rückverfolgbarkeit der Daten.
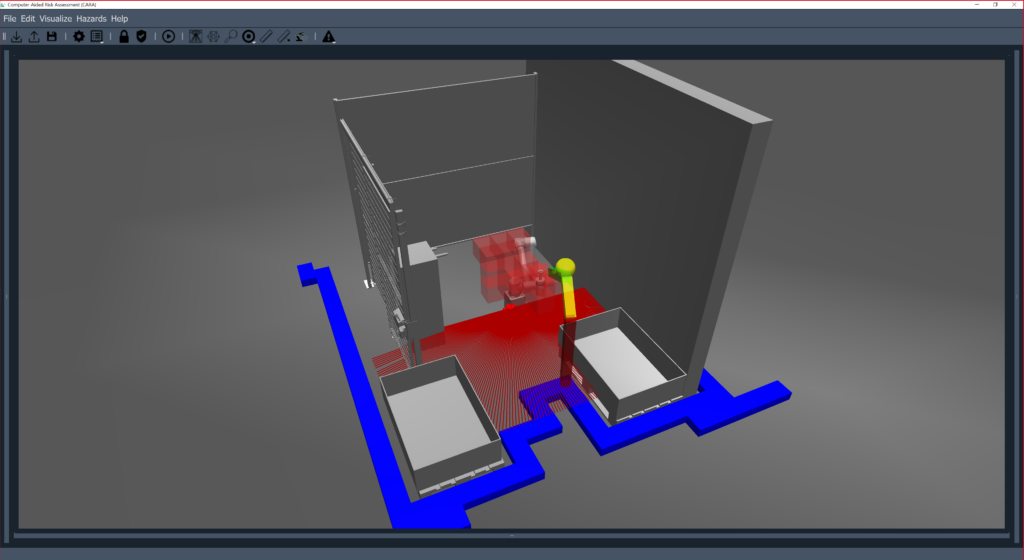
Robo-Dashcam erfasst die Position und die Aktivitäten von Personen im Bereich der Roboterzelle | Quelle: Fraunhofer IPA, Aulon Bajrami
Sicherheitskonzepte über Digitalen Zwilling testen
„Die Robo-Dashcam ist Teil von CARA, kurz für ‚Computer-aided Risk Assessment‘, mit dem wir Unternehmen dabei unterstützen, Sicherheitskonzepte systematisch und teilautomatisiert zu erstellen“, erklärt Abteilungsleiter Dr. Werner Kraus. Dabei werden die 3D-Umgebung und der Roboterprozess in eine Simulationsumgebung geladen und so ein digitaler Zwilling der Roboterzelle erzeugt. CARA ermöglicht eine automatisierte Identifikation von Gefährdungen. Durch die Platzierung von Sicherheitseinrichtungen wie Lichtgittern oder Laserscannern können die identifizierten Risiken gemindert werden, wobei das Tool jeweils die aktuellen KPIs des Robotersystems errechnet. „CARA ist eine zentrale Komponente für unsere Strategie rund um die ‚Automatisierung der Automatisierung‘. Damit verfolgen wir das Ziel, die aktuell hohen Aufwände für Engineering und Inbetriebnahme zu senken“, ergänzt Kraus.
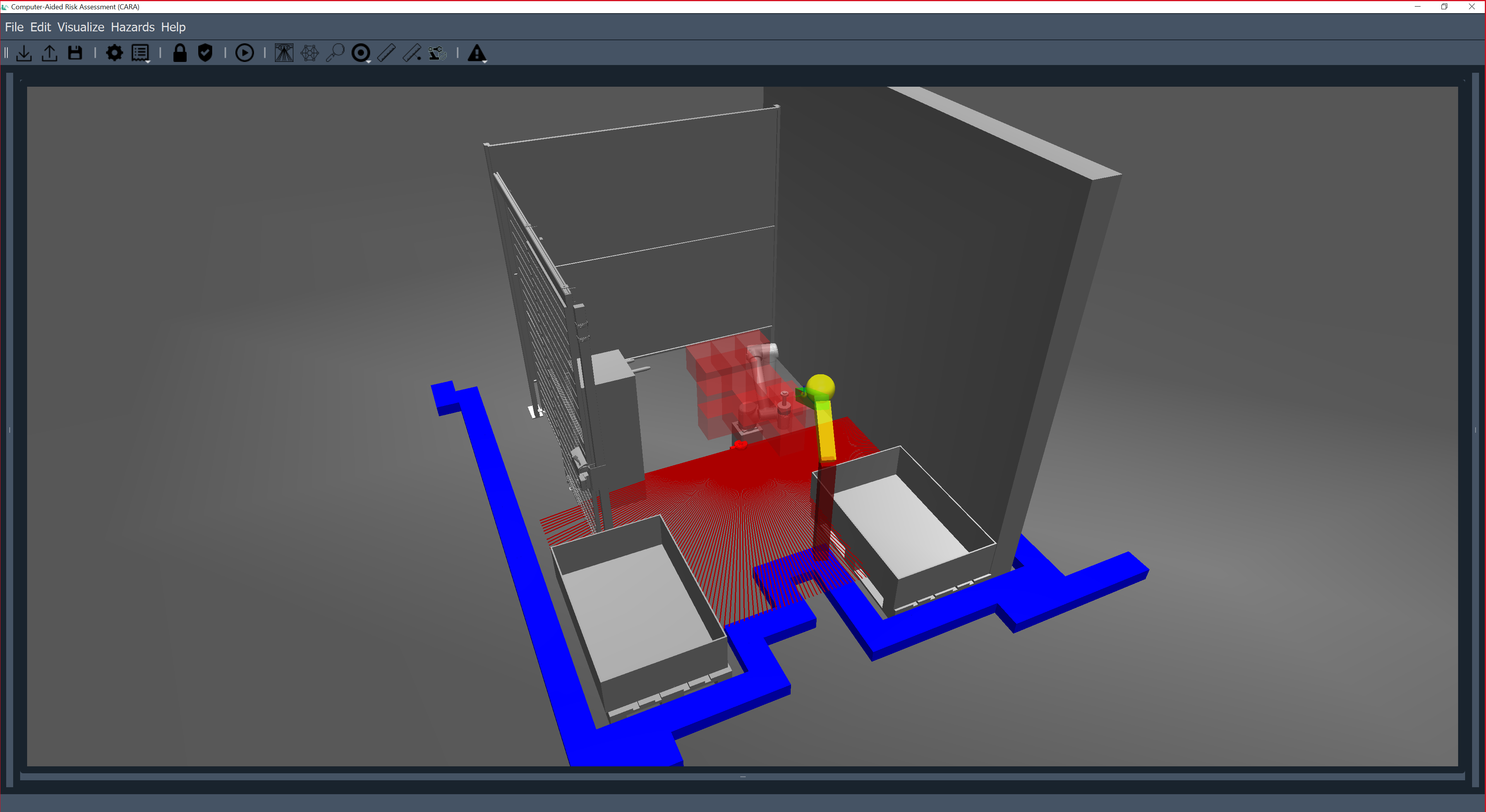
Die von der Robo-Dashcam ermittelten Optimierungspotenziale werden in CARA abgebildet und können dort analysiert und verglichen werden. So kann ein verändertes Sicherheitskonzept zunächst in der Simulation ausprobiert und der Leistungszuwachs verifiziert werden, bevor dann die reale Anlage geändert und die CE-Kennzeichnung angepasst wird. Davon profitiert wiederum CARA, indem es aus einmal identifizierten Optimierungen lernt und dieses Wissen bei zukünftigen Auslegungen berücksichtigt. „Wir messen dann die optimierte Roboterleistung und können in der Regel Sicherheitsabstände reduzieren. So zeigen wir die Effektivität unserer Robo-Dashcam“, sagt Dr. Theo Jacobs, in dessen Gruppe die Anwendung entwickelt wird.
Im Digitalen Zwilling werden die Optimierungspotenziale und erreichbaren KPIs verifiziert | Quelle: Fraunhofer IPA, Mohamed El-Shamouty
„Mit der Robo-Dashcam lässt sich eine Steigerung der Produktivität um 5 bis 10 Prozent erreichen“, schätzt WGP-Professor Thomas Bauernhansl. „Sie eignet sich für alle Roboterzellen, in denen eine Form der Koexistenz oder Kollaboration zwischen Mensch und Roboter stattfindet. Derzeit suchen wir Unternehmen, die Interesse haben, die Robo-Dashcam bei sich zu testen.“
Beitragsbild: Wenn ein Mensch den Arbeitsraum eines Cobots betritt, wird der Roboterprozess meist unterbrochen| Quelle: Fraunhofer IPA, Rainer Bez
Weitere Informationen
www.ipa.fraunhofer.de/robotersicherheit
Ansprechpartner
Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA)
Prof. Thomas Bauernhansl
Institutsleiter IFF der Universität Stuttgart und Fraunhofer IPA
Tel.: +49 711 970 1101
E-Mail: thomas.bauernhansl@iff.uni-stuttgart.de
Dr. Werner Kraus
Abteilungsleiter Robotik
Tel.: +49 711 970 1049
E-Mail: werner.kraus@ipa.fraunhofer.de
Aulon Bajrami
Projektleiter »Computer-Aided Risk Assessment«
Tel.: +49 711 970 1049
E-Mail: aulon.bajrami@ipa.fraunhofer.de
Downloads:
Wenn ein Mensch den Arbeitsraum eines Cobots betritt, wird der Roboterprozess meist unterbrochen. Quelle: Fraunhofer IPA, Rainer Bez
{kind=link}
Robo-Dashcam erfasst die Position und die Aktivitäten von Personen im Bereich der Roboterzelle. Quelle: Fraunhofer IPA, Aulon Bajrami.
{kind=link}
Im Digitalen Zwilling werden die Optimierungspotenziale und erreichbaren KPIs verifiziert. Quelle: Fraunhofer IPA, Mohamed El-Shamouty
Weiterbildung in digitalem Shopfloor Management
Mehr Informationen zu digitalem Shopfloor Management